intel Realsense LiDAR camera L515 documentation 정리
출처 : https://dev.intelrealsense.com/docs/lidar-l500
- SDK 2.0 code samples
- point cloud with python
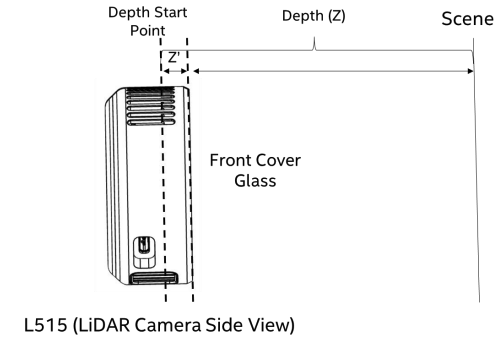
- LiDAR Depth start point
- Front glass로부터 -4.5mm
- Front glass로부터 -4.5mm
- 표면
- 어두운 색상의 카펫과 검은색 플라스틱 등 일부 매질은 많은 빛을 반사하지 않기 때문에 깊이 정보를 얻을 수 없음
- 매끄럽거나 반사 처리된 매질에 비스듬히 닿는 빛은 카메라에 다시 반사되지 않을 수 있음
- 같은 조건에서 비교적 거친 표면은 일부가 다시 반사되어 거리를 측정할 수 있음

- 측정범위
- 주변 햇빛이 범위에 상당한 영향을 줌
- 주변광이 증가하면 카메라에서 생성된 빛과 주변과 노이즈를 분리하는 노력이 필요
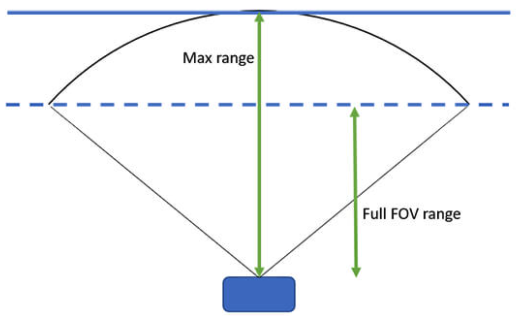
- 평면으로 깊이를 표현하지만 레이저 IR빔을 구형 모향으로 투사함
- 장거리의 깊이 정보를 제공하도록 설계되었지만 가까운 거리도 고해상도 깊이를 제공함
- 근거리에서 사용하려면 근거리 사전 설정을 하는 것이 좋음
- 근거리에서 사용하려면 근거리 사전 설정을 하는 것이 좋음
- 주변 햇빛이 범위에 상당한 영향을 줌
728x90
'Sensor' 카테고리의 다른 글
| [LiDAR / python] intel Realsense LiDAR camera L515 시작하기(3) (0) | 2022.01.25 |
|---|---|
| [LiDAR / python] intel Realsense LiDAR camera L515 시작하기(2) (0) | 2022.01.25 |
